在机器人操作系统ROS 2和仿真软件Gazebo 9的环境下,目标跟踪是人工智能与机器人技术融合的关键应用之一。本文作为系列实践的第四部分,将重点介绍如何基于前序基础,开发人工智能驱动的目标跟踪应用软件。通过结合ROS 2的灵活框架与Gazebo 9的高保真仿真能力,开发者可以高效构建、测试和部署智能跟踪系统。
1. 人工智能在目标跟踪中的应用概述
目标跟踪的核心在于让机器人自主识别并跟随特定目标(如人、物体或其他机器人)。人工智能技术,特别是计算机视觉和机器学习,为此提供了强大支持。在ROS 2中,我们可以利用OpenCV、TensorFlow或PyTorch等库集成AI模型,实现实时图像处理和目标检测。Gazebo 9则提供了一个安全的仿真环境,用于验证跟踪算法的性能,无需依赖实体机器人,从而降低开发风险和成本。
2. 开发环境搭建与依赖配置
确保已安装ROS 2(推荐Humble或Foxy版本)和Gazebo 9。在ROS 2工作空间中,创建包以管理目标跟踪应用。关键依赖包括:
- rclcpp:用于C++节点开发,或rclpy用于Python。
- cv_bridge:连接ROS 2图像消息与OpenCV。
- gazeborospkgs:实现ROS 2与Gazebo的集成。
- AI模型库:例如,使用预训练的YOLO或SSD模型进行目标检测,可通过ROS 2包或自定义节点加载。
通过编辑package.xml和CMakeLists.txt(或setup.py),添加这些依赖,确保系统能编译和运行AI组件。
3. 目标跟踪应用软件开发步骤
开发过程可分为以下阶段:
a. 数据采集与仿真设置
在Gazebo 9中搭建仿真场景,例如,添加一个移动目标(如小车或行人模型)和一个配备摄像头的跟踪机器人。使用Gazebo插件发布图像话题,模拟真实传感器数据。通过ROS 2节点订阅这些话题,获取仿真环境中的视频流。
b. 集成AI模型进行目标检测
开发一个ROS 2节点(例如detection<em>node),使用OpenCV处理图像,并加载AI模型识别目标。将检测结果(如边界框和类别)发布到ROS话题(如/detected</em>objects)。代码示例中,可利用ROS 2的发布-订阅机制实现高效通信。
c. 跟踪算法实现与控制逻辑
基于检测结果,设计跟踪算法(如PID控制或更高级的强化学习)。创建另一个节点(如tracking_node),订阅检测话题,计算机器人与目标的位置偏差,并生成控制命令(如速度指令)。通过ROS 2动作或服务,将命令发送到Gazebo中的机器人模型,实现实时跟踪。
d. 性能优化与测试
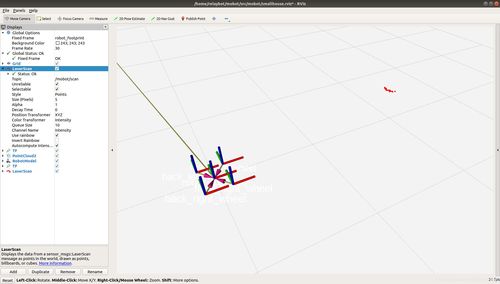
在Gazebo 9中多次运行仿真,调整AI模型参数和跟踪逻辑,以提高准确性和鲁棒性。利用ROS 2的日志和可视化工具(如RViz2)监控系统状态。可考虑使用GPU加速AI推理,以提升处理速度。
4. 实际应用案例与挑战
例如,开发一个仓库机器人跟踪搬运物品的应用。在Gazebo中模拟仓库环境,机器人使用摄像头识别货物并自主跟随。实践中可能遇到挑战:
- 仿真与现实的差距:Gazebo 9的物理引擎可能无法完全复制真实世界,需通过噪声注入增强模型泛化能力。
- 实时性要求:ROS 2的延迟可能影响跟踪效果,优化节点通信和AI模型轻量化是关键。
- 集成复杂度:结合多传感器(如激光雷达)可提高跟踪精度,但需处理数据融合问题。
5. 与展望
通过ROS 2和Gazebo 9,开发者可以构建一个完整的人工智能目标跟踪应用软件,从仿真测试到实际部署。本文介绍了核心开发流程,强调了AI模型集成与系统优化的要点。随着ROS 2生态的完善和AI技术的进步,目标跟踪将更加智能化和自适应,推动服务机器人、自动驾驶等领域的创新。继续探索本专栏的前序内容,以深入了解基础设置和高级技巧,助力您的项目成功。